OnStep aneb robotizace dalekohledů
Jak to začalo
Jak to bývá, na jaře roku 2017 se sešlo několik událostí, které ovlivnily další vývoj.

» Byl jsem vlastníkem montáže EQ3 SEBEN – (mechanicky shodná s tou, co bývala u populárního Lidlskopu)
» Stal jsem se také vlastníkem 3D tiskárny Anet A8 (čínský klon Průšovy i3)
» Na internetu jsem narazil na stránku Stellar Journey, kde Howard Dutton popisoval svůj projekt OnStep, na kterém pracoval již od roku 2012 a nyní se dostal do velmi použitelného stavu. Navíc celý projekt publikoval pod GNU licencí na Github.
Projekt mě nadchnul. Stavba prvního řadiče na bázi Arduino modulu Mega2560 dle Howardova popisu byla jednoduchá a potřebné komponenty na eBay byly za velmi příznivé ceny, a tak jsem vše potřebné, včetně krokových motorů, objednal. Za cca 3 týdny jsem měl vše potřebné doma a mohl se pustit do stavby prvního prototypu.
Přestavba EQ3 SEBEN
Jak jsem již uvedl, montáž je mechanicky shodná i s EQ montáží dříve dodávané k populárnímu Lidlskopu i jiných výrobců. Na Thingiverse jsem našel jedno z technických řešení, jak k této montáži připojit krokové motory:

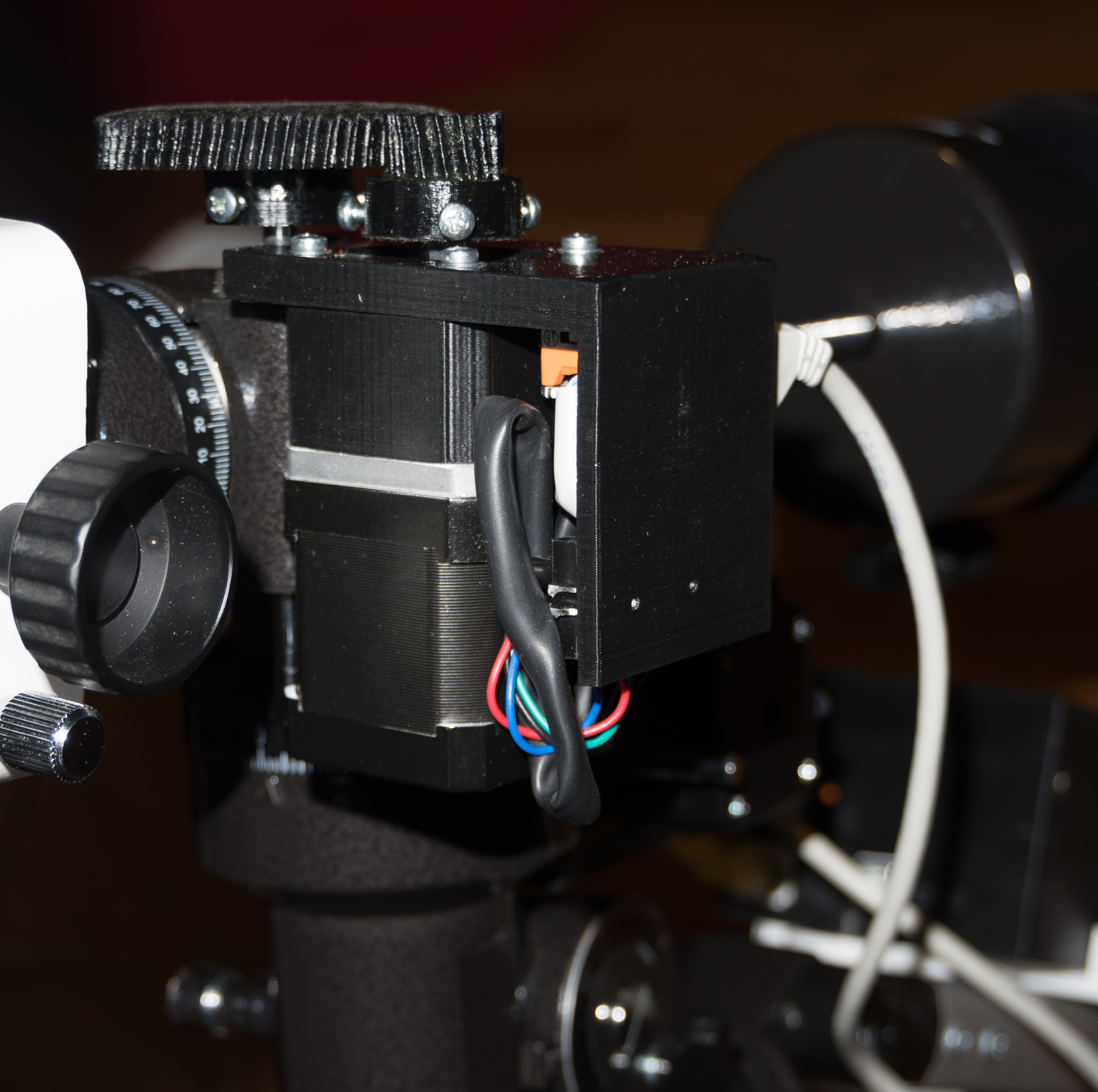
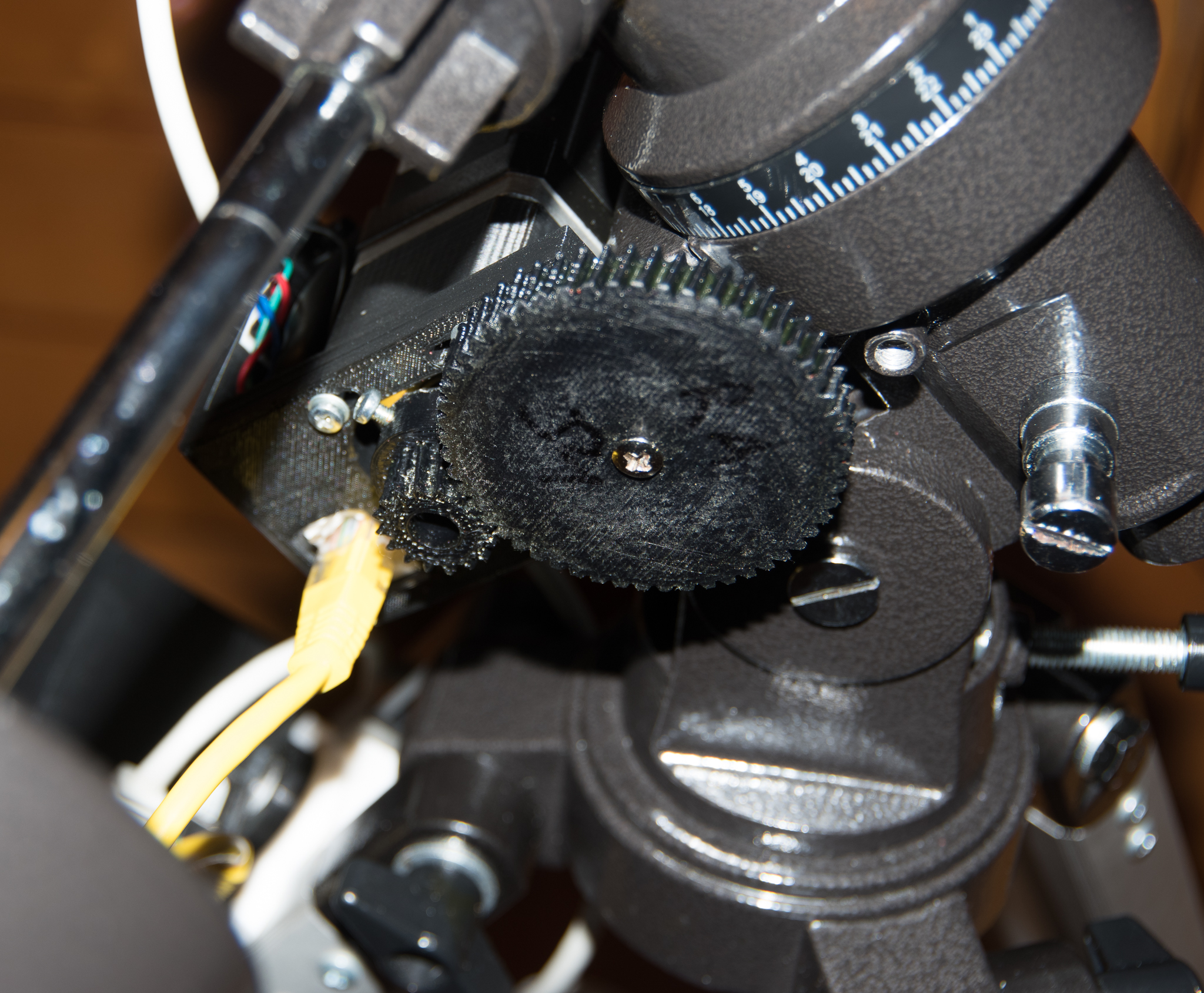
Jak se velmi brzo ukázalo, toto řešení není zrovna nejlepší, protože neumožňuje plný rozsah pohybu v deklinaci, protože RA motor na západní straně překáží. Dále mé krokové motory neměly dostatečný výkon, aby s montáží spolehlivě pohybovaly. Proto jsem se rozhodl navrhnout vlastní řešení, které jsem posléze publikoval také na Thingiverse.
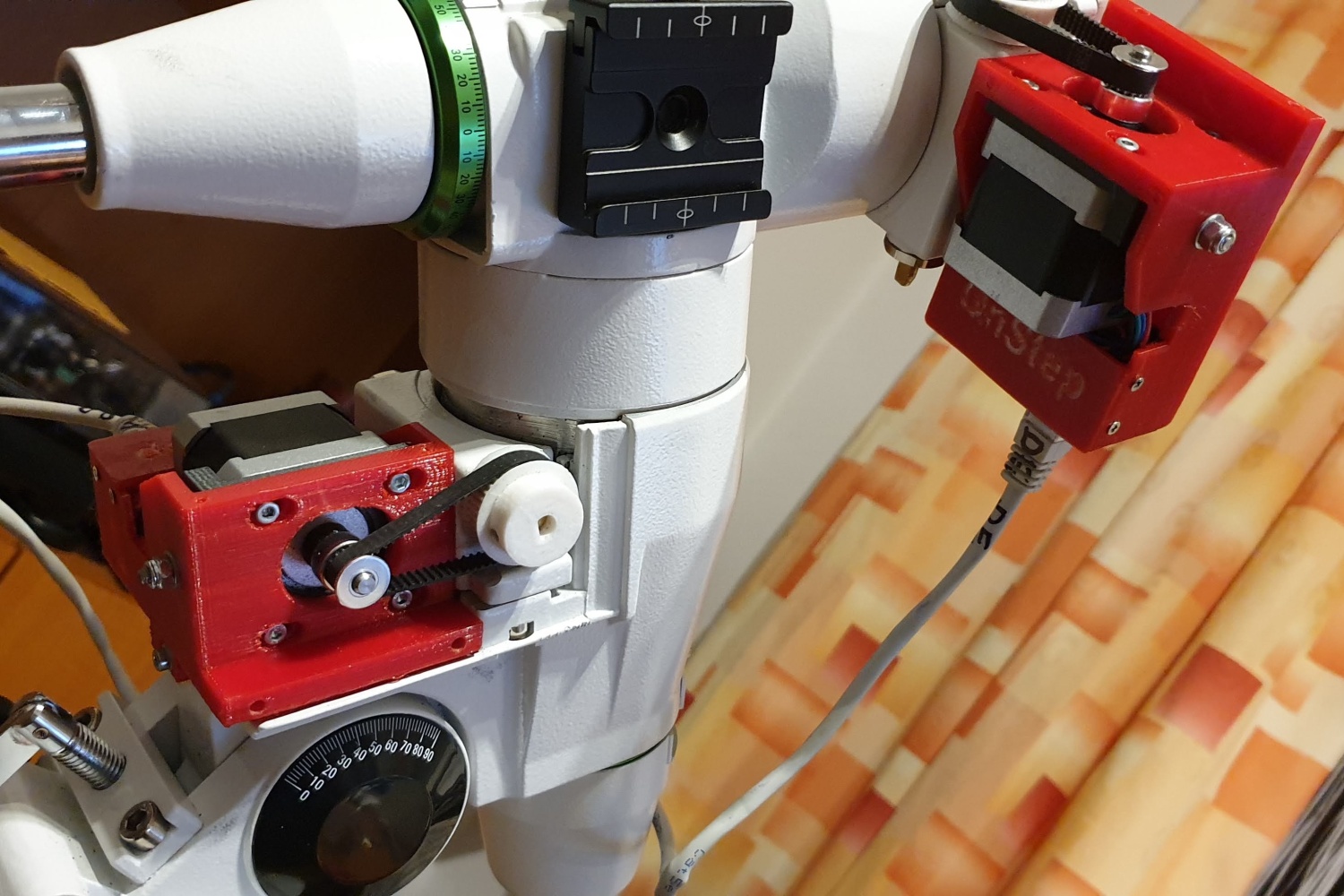
První verze z léta 2017 měla plastové převody. Zde je několik fotografií:

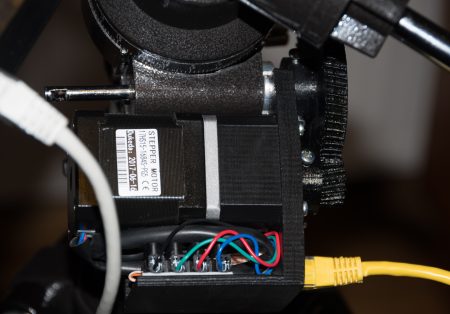
V pozdější verzi z počátku roku 2018 byly některé části nahrazeny za kovové a pro převody použity GT2 řemeny:


První řídicí jednotka OnStep
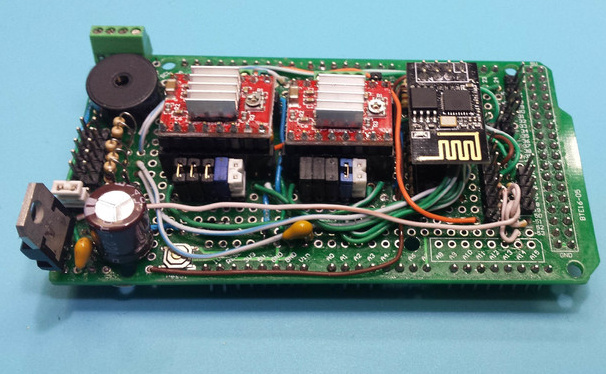
Ale srdcem robotického dalekohledu je řídicí jednotka. První funkční jednotku jsem dle Howardova návodu postavil na nepájivém poli již počátkem července 2017 a jako zázrakem vše fungovalo na první pokus. Vše si je možné prohlédnout na následujícím videu, které jsem tehdy natočil:
Po úspěšných testech jsem tuto jednotku postavil na univerzálním plošném spoji od Adruino Mega2560 a umístil do krabičky, kterou jsem pro tento účel navrhl:

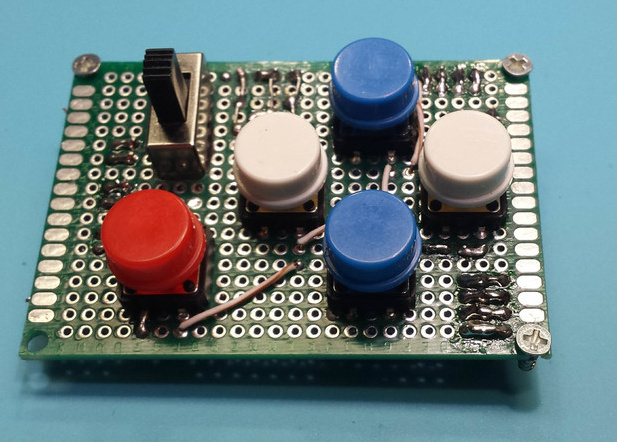
Dalším užitečným doplňkem je i jednoduchý křížový ovladač, který se k řídicí jednotce připojuje prostřednictvím ST4 portu, ten jsem také navrhl:

První světlo
Koncem srpna 2017 nastal čas na první světlo – první DSO snímky jsou z hlediska technické kvality na dnešní dobu nic moc, ale jsou to mé první DSO snímky pořízené dalekohledem s výše popsanou sestavou a ve městě kde značné světelné znečištění.

M33, 29. 8. 2017, Vrkoslavice, Newton 150/750 mm, Pentax K-70, 31×30 sec, ISO 6400

M31, 29. 8. 2017, Vrkoslavice, Newton 150/750 mm, Pentax K-70, 38×30 sec, ISO 6400
Vývoj systému OnStep v roce 2018
V roce 2018 vývoj systému zaznamenal další významný posun jak ze strany Howarda, tak i dalších spolupracovníků. Zejména Charles Lemaire do systému OnStep přidal software SHC (Smart Hand Controller), jež vyvinul v rámci svého projektu „Teen Astro“. Další důležitou změnou byl i návrh prvních plošných spojů Howardem v systému EasyEDA. System EasyEDA sponzoruje firma JLCPCB, která vyrábí i malosériové zakázkové PCB za velmi příznivé ceny (5 ks za 2 $), a to v profesionální kvalitě. Možnost nákupu těchto „profi“ PCB značně zjednodušilo konstrukci řídicích OnStep jednotek.
I já jsem jsem této možnosti poprvé využil a zakoupil PCB na stavbu SHC dle Howardova návrhu. SHC jsem úspěšně postavil a navrhl jsem i několik drobných úprav – doplňků. Také jsem navrhl vlastní upravenou krabičku, vše jsem pak zveřejnil na Thingiverse.

Doplňky k EQ6 Pro Synscan
Teď malá odbočka. Mechanické nedostatky montáže EQ3 SEBEN nezachránila ani nejlepší elektronika a pokud jsem kromě planet a Měsíce chtěl fotit DSO s delšími časy, bylo nutné se poohlédnout po něčem dokonalejším. Volba nakonec padla na SkyWatcher EQ6 Pro. Poté, co se objevila doma, mě trochu překvapilo, že po stránce elekroniky je minimálně o jednu generaci pozadu za systémem OnStep. Zejména mi scházelo přímé propojení s aplikací SkySafari z mobilu nebo tabletu, na které jsem si již u OnStepu zvyknul.
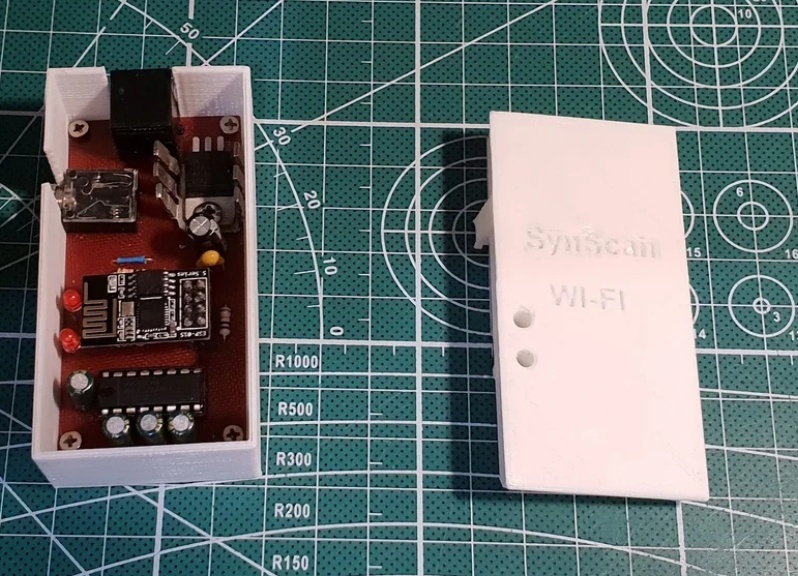
Abych tento nedostatek nějak vyřešil, navrhl jsem v sytému EasyEDA dva pomocné Bluetooth a Wi-Fi moduly, které je možné připojit k SynScan ručce. Moduly navíc umožňují ovládání spouště fotoaparátu pomocí interního časovače v SynScan ručce. Potřebné krabičky jsou také na Thingiverse: Bluetooth / Wi-Fi.


Malá cestovní EQ montáž z 3D tiskárny
Myšlenka vytvořit malou EQ montáž vznikla již koncem roku 2017, kdy po dvou méně úspěšných pokusech (zde a zde) jsem se počátkem roku 2019 dopracoval k verzi, která je použitelná i pro DSO snímky i s delším časem. A může směle konkurovat komerčnímu systému Star Adventurer od SkyWatcher. Navíc disponuje plnohodnotným GOTO systémem včetně řízení v deklinaci.

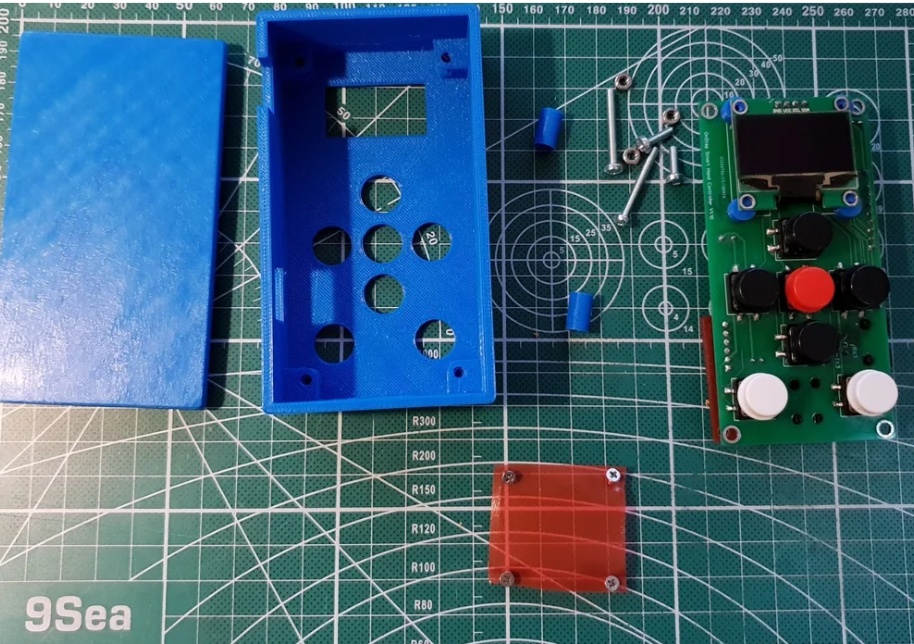
Nutno poznamenat, že vytouženého výsledku jsem dosáhl až při použití motoru s HG převodovkou 17HS15-1684S-HG100. Levnější PG motory 17HS19-1684S-PG100 se z důvodu značné vůle neosvědčily. Další změnou bylo použití druhé veze plošného MiniPCB2 pro stavbu OnStep ovladače, kterou na EasyEDA navrhl Howard Dutton. Pro tento řadič jsem navrhl vlastní krabičku pro 3D tiskárnu. Vše se tím rázem zmenšilo do přijatelných cestovních rozměrů.


Ukázkové DSO snímky:

M31, 30. 6. 2019, Lom Stanislaw PL, Pentax K-70, HOYA HMC Tele-Auto f=135 mm 1:2.8 f/4, 25×60 sec, ISO 1600

Kometa C/2017 T2 (PanSTARRS) u h a χ Per, 25. 1. 2020, Rozdroże Izerskie PL, Pentax K-70, HOYA HMC Tele-Auto F=135 mm 1:2.8 f/4, 125×60 sec, ISO 6400, Optolong 2″ CLS filtr
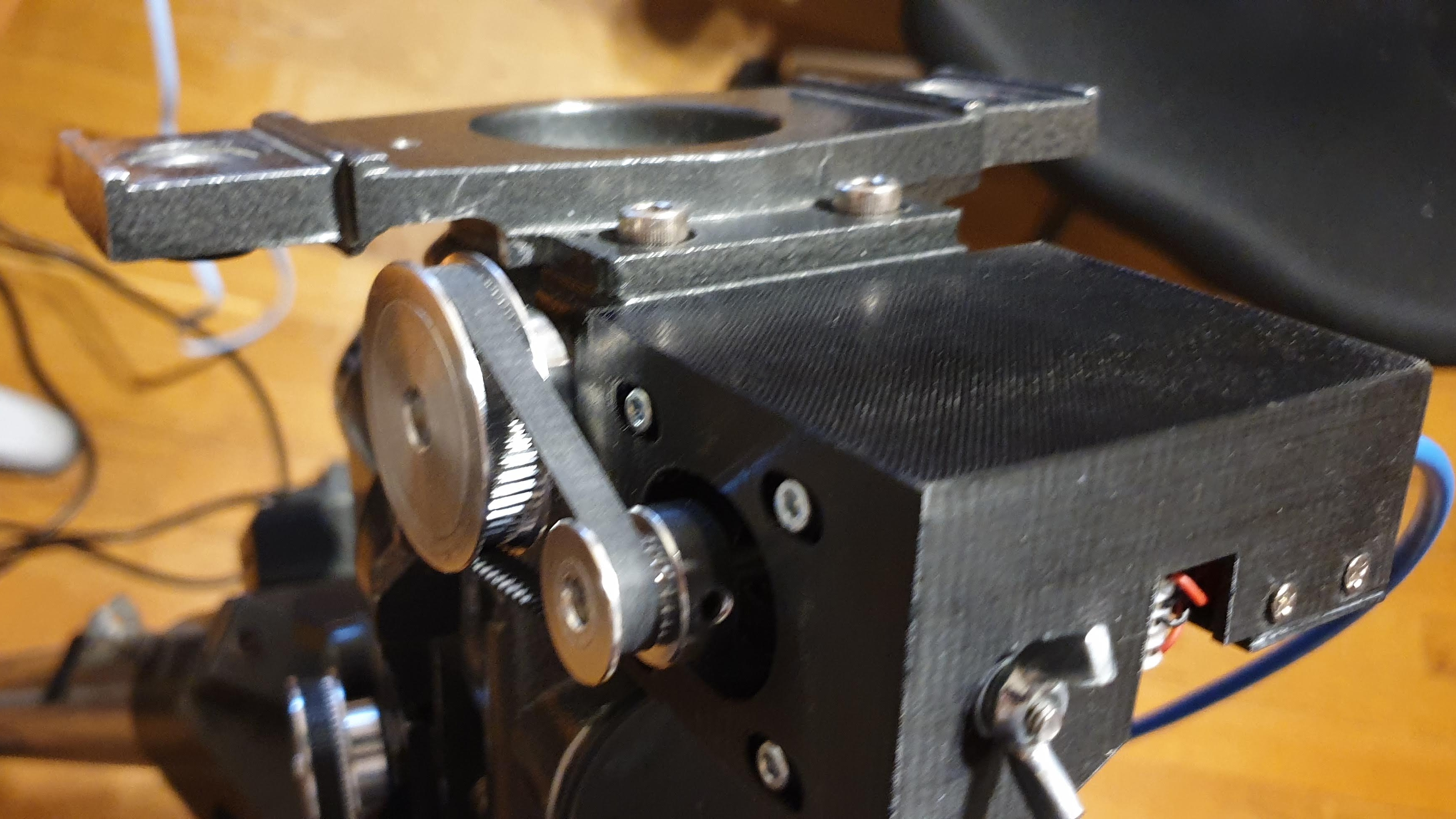
Přestavba SkyWatcher EQ5 na OnStep
Počátkem roku 2020 se mi podařilo získat novou montáž SkyWatcher EQ5 mount bez elektrických pohonů. Vzhledem k předchozím zkušenostem bylo pro mě již celkem jednoduché adaptovat tuto montáž na OnStep GoTo, a to opět zejména pomocí dílů vytisknutých na 3D tiskárně. Původní návrh z února jsem dle zkušeností z provozu nyní na podzim vylepšil – doplnil o vnější kryty řemenových převodů. Navíc díly z červeného PETG vypadají nyní velmi elegantně :-) Modely dílů pro 3D tiskárnu jsou zde.

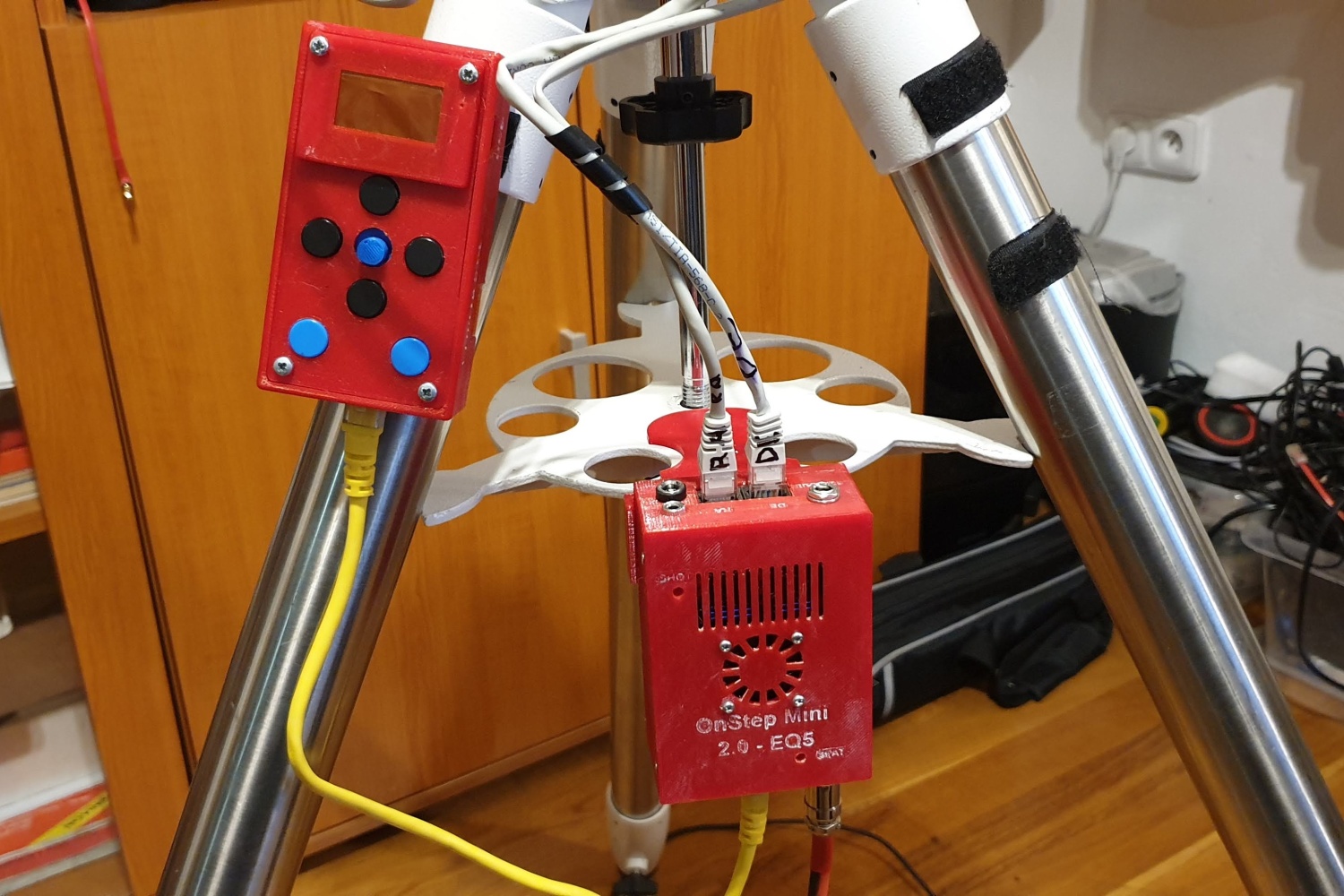
Řídicí jednotka OnStep je opět postavena na základě MiniPCB2, ovladače krokových motorů jsou TMC2130 a díky tomu má moje řešení teoreticky cca dvojnásobnou přesnost než originální tovární jednotka SynScan pro tuto montáž (0,14 úhlové vteřiny na mikrokrok) tj. na úrovni EQ6. SHC jen nyní postaveno na základě desky, kterou navrhl Dave Schwartz, kde místo procesoru Teensy 3.2 je použít levnější, ale přesto výkonnější processor ESP32.
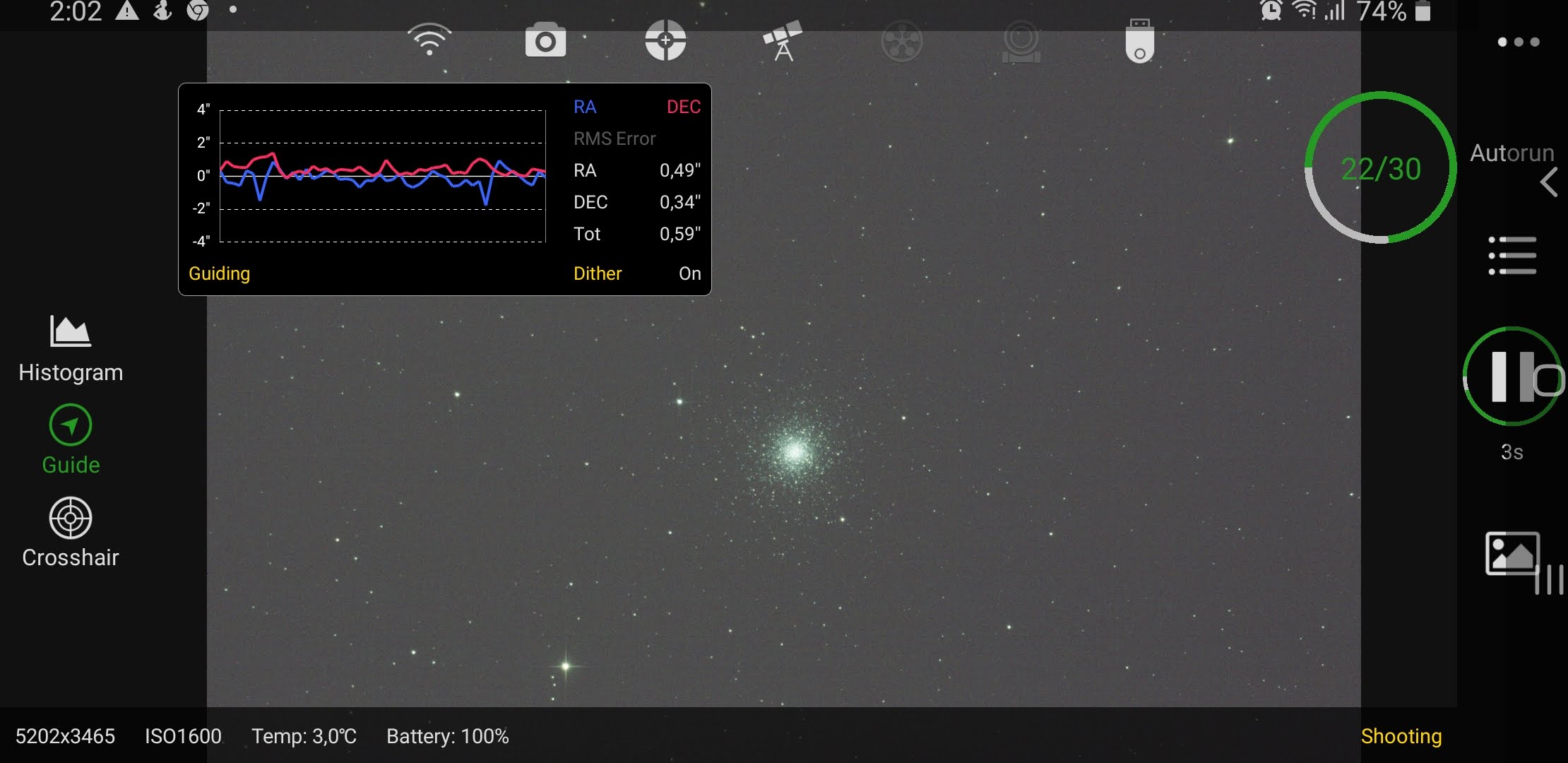
Ukázka přesnosti běhu pointace, jak to zobrazuje ASIair
Ukázkové DSO snímky:

M3, 26. 3. 2020, Jizerka, Newton 150/750 mm, Canon EOS 1300D, 30×60 sec ISO 1600.

Leo Triplet, 23. 3. 2020, Alšovice, Newton 150/750 mm, Canon EOS 1300D, 60×180 sec ISO 1600.
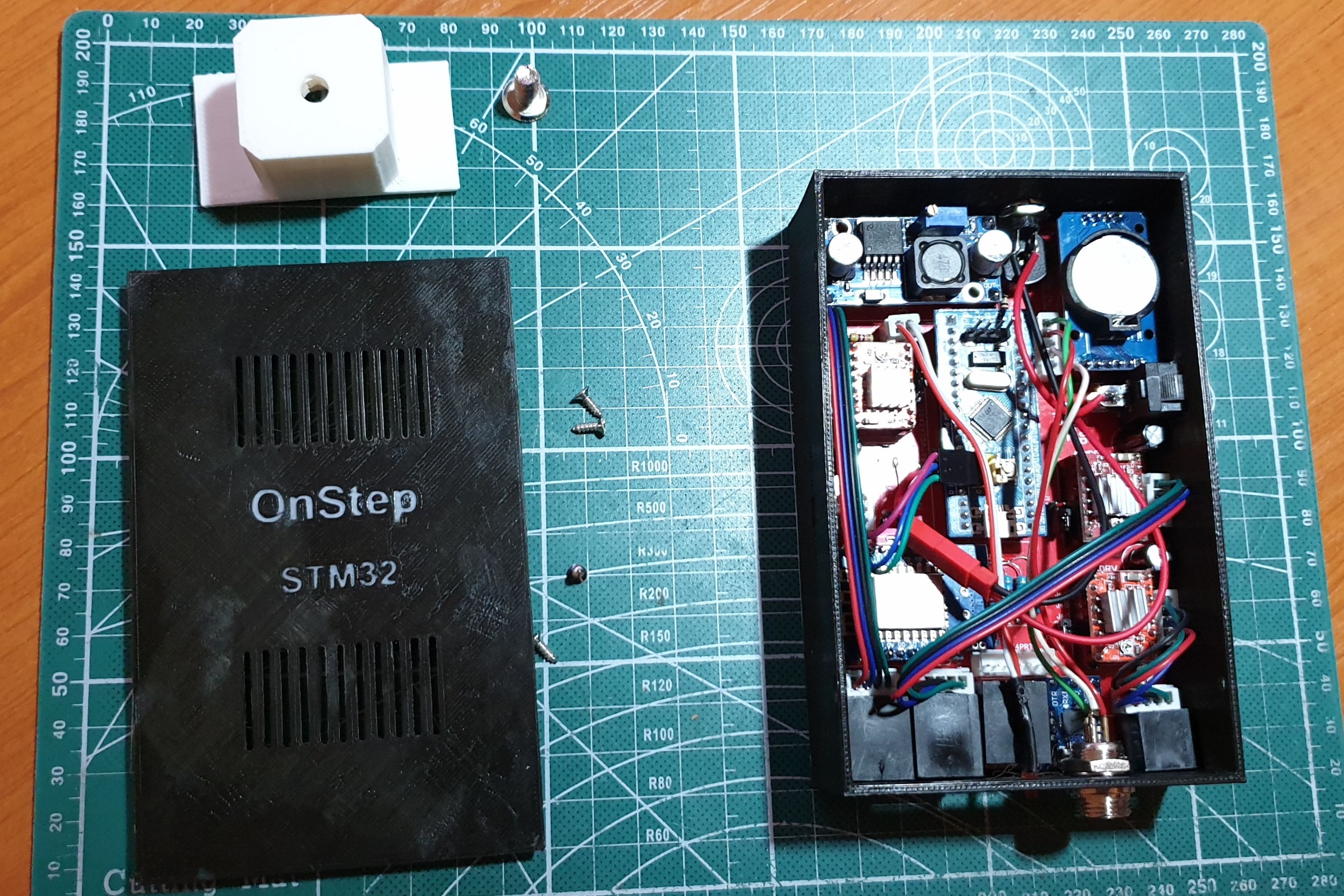
Přestavba GS-280 na OnStep
Dalším strojem, který jsem přestavěl, je montáž GS-280, kterou dříve vyráběla firma GSO. Ve skutečnosti jsem ale ze dvou částečně poškozených sestavil jednu funkční. Potřebné moduly pro přestavbu byly také vytvořeny pro 3D tiskárnu.



OnStep řadič pro tuto přestavbu jsem postavil na základě procesoru STM32 Blue Pill, plošný spoj pro tuto platformu navrhl Khalid Baheyeldin a Dave Schwarts na tyto verze řídicí jednotky na rozdíl od MiniPCB2 má navíc i integrovaný řadič pro budoucí řízení krokového motoru elektronického fokuseru. Moje krabička i pro tuto variantu je k dispozici na Thingiverse.
Tuto montáž nyní využívá Martin Mašek se starším objektivem Zeiss Sonnar 180 mm pro svá vědecká „balkónová“ pozorování. Příkladem je sledování jasnějších proměnných hvězd, které se dají slušně měřit i z města. Viz ukázka světelné křivky zákrytové proměnné hvězdy EE Cet.
Vlastnosti systému OnStep
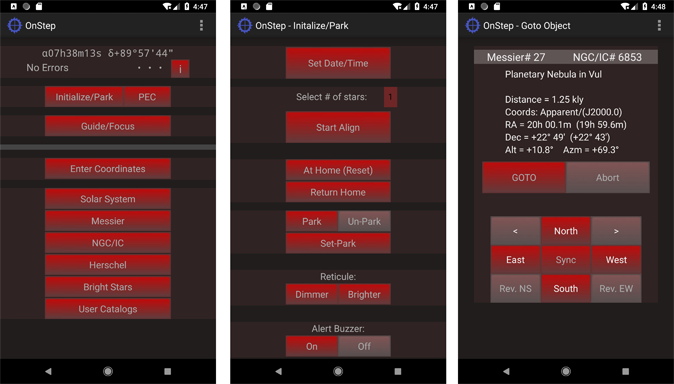
Pro komunikaci s okolním jsou pro OnStep k dispozici jak ASCOM, tak INDI i INDIGO drivery, které umožnují komunikaci jak přes sériové USB rozhraní, tak i prostřednictvím IP protokolu. K dispozici je také aplikace pro mobilní telefony a tablety, a to jak pro Android, tak i pro Apple iOS. Aplikace pro Android umožnuje spojení přes WiFi nebo Bluetooth a aplikace pro Apple iOS umožňuje spojení pouze přes WiFi.
Pro ostatní platformy je k dispozici i integrovaný webový server:
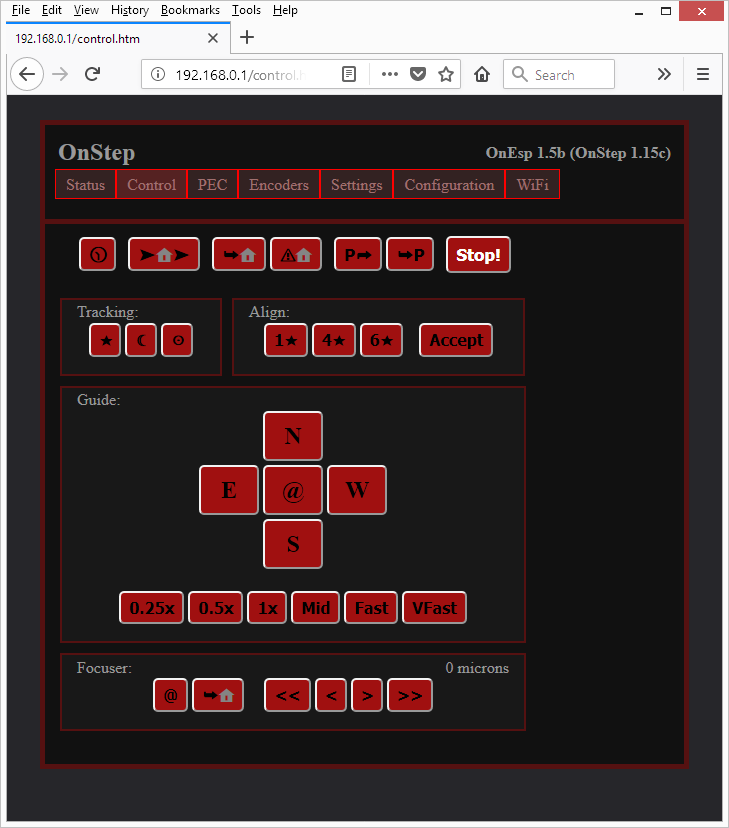
Komunikační protokol OnStep vychází z protokolu LX200, který zavedla firma Meade, ale v současné době ho značně rozšiřuje. Podrobný popis je zde.
Co na závěr?
Těchto tři a půl roku s OnStepem mě hodně obohatilo o nové znalosti jak v oblasti 3D tisku, tak zejména ve stavbě elektronických obvodů na bázi systému Arduino. Škoda že tyto možnosti nebyly v době mého mládí :-)
V nově zřízeném „Technickém koutku“ si na těchto stránkách příště řekneme o systému ZWO ASiair – fotografování DSO nebo planet pouze pomocí mobilu nebo tabletu, případně o mých dalších zajímavých projektech.
Zpracoval: Roman Hujer, KaL
19 října, 2020, 17:17
Fíííha, tak to smekám klobouk!
Roman je prostě technický genius :^)
8 března, 2021, 17:02
Zdravím. I když je to místama pro mne co do znalostí trochu španělská vesnice, tak Romanovi moc fandím včetně jeho nádherných snímků !!